El robot de inspección es un tipo de robot que se desplaza a lo largo de la línea aérea de transmisión de alto voltaje para reemplazar o ayudar a la inspección manual de funcionamiento de la alimentación especial. Desempeña un papel vital en la producción y la vida diaria y disfruta de una perspectiva prometedora con una amplia gama de aplicaciones.
El motor de engranajes de robot de inspección es un motor de engranajes de transmisión de baja potencia, cuya estructura de transmisión principal es una pieza de equipo de transmisión de desaceleración montada por la fabricación integrada de un motor de accionamiento y una caja de cambios (reductor). El motor de accionamiento puede adoptar un motor CC con escobillas, motor BLDC, motor paso a paso, motor sin núcleo o servomotor como fuente de accionamiento, mientras que la caja de cambios puede adoptar una caja de cambios planetaria, una caja de cambios de gusano o una caja de cambios general como reductor. Los parámetros técnicos del sistema de caja de cambios del motor del robot de inspección están personalizados para el desarrollo, incluyendo la potencia de salida, el voltaje, la relación de reducción, el par de salida, la velocidad de entrada, la precisión de transmisión, el ruido de transmisión, el tipo de motor de accionamiento, la estructura de caja de cambios, el material y las especificaciones. ¿Dónde comprar los motores de robótica adecuados para los robots?
ZHAOWEI Machinery & Electronics Co., Ltd., se esfuerza para ofrecer servicios de la investigación y el desarrollo, el diseño y la fabricación del sistema de transmisión de engranajes del motor del robot. Los parámetros técnicos personalizadas de tal sistema de transmisión de micromotor de engranajes desarrollado por ZHAOWEI es la siguiente:
Diámetro: 3,4-38 mm
Voltaje: <24V
Potencia de salida: <50W
Velocidad de salida: 5-1500 rpm
Relación de Velocidad: 5-2000
Par de salida: 1,0gf.cm-50kgf.cm
Es compacto y ligero, con fuerte capacidad de sobrecarga, alta eficiencia y baja tasa de calor.
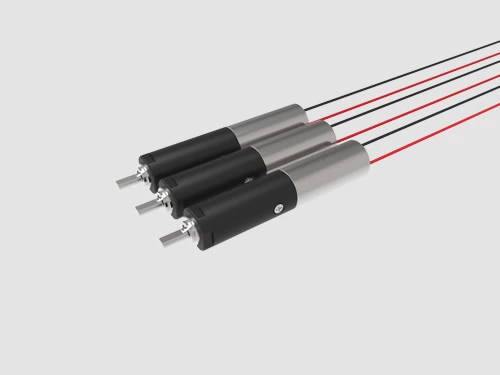
Parámetros del Motor de Robot de Inspección:
| Material | Metal |
| Diámetro externo | 32mm |
| Rango de temperatura de funcionamiento | -30℃~+100℃ |
| Dirección de rotación | cw&ccw |
| Blacklash de engranaje | ≤2° |
| Voltaje (Opcional) | 3V~24V |
| Cojinete | Cojinete poroso/Rodamiento |
| Velocidad de entrada | ≤15000rpm |
| Holgura axial | ≤0.1mm |
| Corriente | 300mA max |
| Carga radial en eje de salida | ≤120N/≤180N |
| Motores (Opcional) | paso a paso/CC con escobilla/Motor CC sin escobilla |

Desarrollo Personalizado del Caso de Servicio de Motor de Engranajes de Robot:
Nombre del Proyecto: El motor de engranajes para Caminado sobre Ruedas de Robot Inteligente
Antecedentes del Proyecto: Con la popularidad de la educación de STEAM y la aparición de la inteligencia artificial, así como 5G, inteligentes suites de productos de robot y varios componentes de extensión están apareciendo. Los robots inteligentes pueden operar según los programas preprogramados o los principios definidos por la tecnología de inteligencia artificial. Los productos maduros e inteligentes pueden sustituir a las tareas manuales, como la fabricación, la construcción o las tareas peligrosas. Clasificado por los patrones de locomoción robóticos, un robot se puede categorizar en tipo con ruedas, el tipo de patas, el tipo oruga, el tipo serpiente y el tipo combinado.
Introducción del Proyecto: La pieza de accionamiento de caminado con ruedas del robot adopta una combinación de un robot de motor CC, que necesita una caja de engranajes planetarios de 38 mm, con un modo de instalación antisimétrica. De esta manera facilita la reducción del punto de soporte de fuerza del eje de salida del reductor, acorta significativamente la distancia entre ejes, y ahorra espacio si el juego de ruedas puede ser coaxial y se ofrece un enorme poder (la dimensión del motor es generalmente proporcional a la potencia en cierta medida), de ese modo haciendo que el robot sea de tamaño pequeño. Debido a la utilización de este método de instalación, la elección del motor puede ser más extensa. ZHAOWEI toma orgullo en su robot de motor de engranajes de metal de 38 mm compatible con la mejora del par y la reducción de la velocidad. Además, es factible tomar ventaja del autobloqueo en la fricción para activar la función de frenado cuando se necesita parar, mientras que se extiende la distancia entre ejes para satisfacer las necesidades de instalación del juego de ruedas.