Parámetros y Desarrollo Personalizado del Motor de Engranajes para la Pinza Robótica
Una pinza robótica denota un dispositivo de funcionamiento automático que puede imitar a la mano y el brazo de algunas funciones de acción para captar los procedimientos fijos, transportar objetos o manipular herramientas. La pinza robótica es el robot industrial más temprano y también el robot moderno más temprano, que puede sustituir el trabajo manual pesado para alcanzar la mecanización y automatización de la producción y operar en un entorno perjudicial para proteger la seguridad personal. La pinza robótica se divide principalmente en dos partes, el brazo y el efector final robótico. El brazo utiliza movimiento de la articulación para accionar el efector final para llegar a la posición predeterminada para la operación preestablecida.
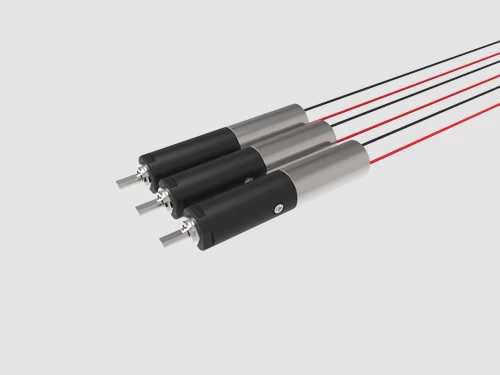
El motor CC de engranajes para la pinza del robot es un micro motor de engranajes de transmisión de potencia pequeña, cuya estructura principal de la transmisión está montada por un motor de accionamiento (micromotor) y caja de engranajes planetarios (reductor), cuya abreviatura es “motor de pinza robótica.” Se aplica al módulo de transmisión del brazo robótico y la pinza robótica. El motor de accionamiento puede utilizar motor CC, motor con escobillas, motor BLDC, servomotor, motor paso a paso, motor sin núcleo y micromotor como la fuente de accionamiento, mientras la micro caja de engranajes puede adoptar una reductora planetaria, una reductora cilíndrica y una reductora de gusano como reductor. Los parámetros técnicos son a menudo personalizados para desarrollos, incluyendo la potencia de salida, la relación de engranajes, el par de salida, el voltaje, el tipo de motor motriz, la estructura de la caja de cambios, el ruido de la transmisión y la precisión de la transmisión.
ZHAOWEI Machinery & Electronics Co., Ltd. presta un conjunto de servicios de desarrollo personalizados. Los parámetros técnicos personalizados de micro motores de engranajes de robot proporcionados por ZHAOWEI son los siguientes:
Diámetro: 3,438 mm
Voltaje: <24V
Potencia de salida: <50
Velocidad de salida: 51500rpm
Relación de engranajes: 22000
Par de salida: 1,0gf.cm50kgf.cm
Parámetros de Micro Motores de Engranajes para Pinzas Robóticas:
| Material | Metal |
| Diámetro externo | 22mm |
| Rango de temperatura de funcionamiento | -30℃~+100℃ |
| Dirección de rotación | cw&ccw |
| Blacklash de engranaje | ≤2° |
| Voltaje (Opcional) | 3V~24V |
| Cojinete | Cojinete poroso/Rodamiento |
| Velocidad de entrada | ≤15000rpm |
| Holgura axial | ≤0.1mm/≤0.1mm |
| Corriente | 300mA max |
| Carga radial en eje de salida | ≤120N/≤170N |
| Motores (Opcional) | paso a paso/ sin núcleo/Motor CC sin escobilla |
Nombre del Proyecto: Caja de Cambios para Articulaciones de Robot
Antecedentes del proyecto: un motor de engranaje CC se utiliza para la comunicación mediata y la respuesta rápida al accionamiento de las articulaciones del robot, que necesita una relación mayor potencia-peso y de par-inercia, mayor par de arranque, baja inercia, y amplio y suave rango ajustable de velocidad. En particular, el efector final robótico (pinza) debe adoptar el motor de articulación con un tamaño compacto, ligero y de gran capacidad de sobrecarga de corta duración.
Introducción del Proyecto: Basado en el desarrollo y la exploración de la tecnología de materiales resistentes a la abrasión, el procesamiento de las técnicas de optimización, la tecnología de lubricación, la técnica de embalaje, la tecnología de pruebas de vida, y el mecanismo de transmisión, ZHAOWEI desarrolla y fabrica micro cajas de engranajes de articulación de robot para mejorar el rendimiento del robot inteligente, incluyendo percepción e identificación, el mecanismo y la transmisión, el control y la interacción. La gama completa de robots de precisión adopta el motor de engranajes con reductora planetaria cuyos parámetros se pueden personalizar (diámetro: 3,438mm, potencia: 0,0140W, velocidad de salida: 52000rmp, relación de engranajes: 51500, par de salida: 1,050kgf.cm).