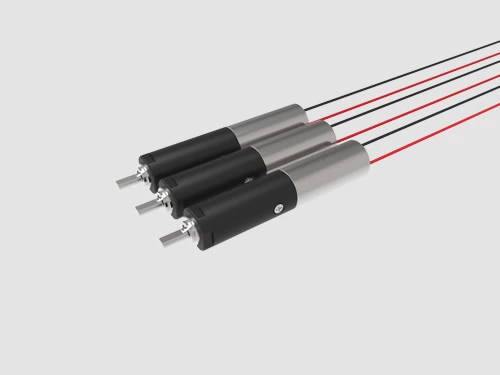
Como actuador final del robot, la mano robótica es un dispositivo automático que imita el movimiento de la mano de la persona y realiza el agarre, la manipulación y la operación automáticos de acuerdo con un programa establecido, la planificación de la trayectoria y los requisitos. Como agencia de tareas tradicional, los robots desempeñan un papel fundamental tanto en los robots industriales como en los de servicio. Con el fin de mejorar la flexibilidad del robot, se adopta ampliamente el motor CC en miniatura que consiste en un motor de accionamiento y una caja de cambios, que es un módulo de transmisión con funciones de desaceleración, transmisión y aumento de par.
Los micro motores de CC para dedos de robot generalmente se personalizan para el desarrollo. El rango de parámetros es:
Diámetro: 3,4 mm-38 mm
Voltaje: ﹤ 24V
Ruido de transmisión: ﹤ 45dB
Velocidad de salida: 5-1500 rpm
Relación de engranajes: 5-2000
Precisión de rotación de la caja de cambios: en 2 minutos de arco
ZHAOWEI está comprometida con la investigación y el desarrollo, el diseño y la fabricación de cajas de engranajes de precisión en miniatura y proporciona un conjunto completo de servicios de personalización.
Caso Exitoso: Articulación de Robot
Problema técnico: La necesidad de la eficiencia de la transmisión y la reducción del ruido de la articulación del robot se puede realizar después de una complicada depuración.
Esquema Técnico: ZHAOWEI optimiza el coeficiente de desplazamiento del engranaje y la comprobación de interferencia de los engranajes planetarios, mejora la eficiencia del motor de la articulación y hace que el movimiento de la articulación del robot sea más flexible.
Logros: Los motores de engranajes de CC se utilizan en las articulaciones de los robots de transmisión. Requieren una gran relación par-inercia, un alto par de arranque, una baja inercia y un amplio rango de velocidad. En particular, el actuador del extremo del robot debe ser pequeño en tamaño y masa y tener un motor de articulación con una capacidad de sobrecarga de corta duración.