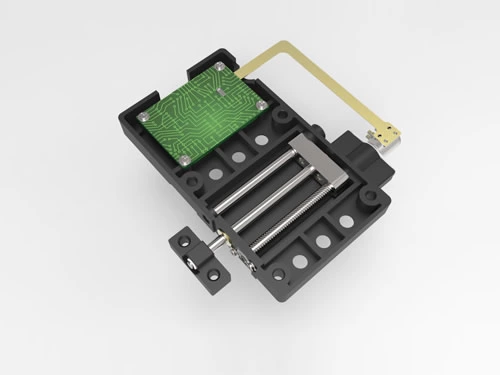
El motor para perro robótico es un sistema de transmisión de micromotor de engranajes utilizado para el accionamiento de la articulación del perro robótico inteligente. La estructura de transmisión principal integra el motor de accionamiento (micro motor) y la caja de cambios (reductor). El motor de articulación del perro robótico puede conducir al perro robótico a caminar de forma adaptativa. Permite que el perro robótico suba pendientes y camine por caminos de gravas. El movimiento hacia adelante, atrás, arriba, abajo, el ángulo de guiñada, el ángulo de cabeceo y el ángulo de balanceo pueden ser controlados cuando se camina por una terraza desnivelada. Este tipo de parámetros técnicos necesitan ser personalizados, como la potencia de salida, el par de salida, el ruido, la precisión, el modo de transmisión de la caja de cambios, el rendimiento del motor de accionamiento. ZHAOWEI Machinery & Electronics Co., Ltd se compromete a proporcionar un servicio integral de personalización.
Nombre del Proyecto: Motor de Articulación del Robot
| Material | Metal |
| Diámetro externo | 24mm |
| Rango de temperatura de funcionamiento | -20℃~+100℃ |
| Dirección de rotación | cw&ccw |
| Blacklash de engranaje | ≤3° |
| Voltaje (Opcional) | 3V~24V |
| Cojinete | Cojinete poroso/Rodamiento |
| Velocidad de entrada | ≤15000rpm |
| Holgura axial | ≤0.3mm/≤0.2mm |
| Corriente | 300mA max |
| Carga radial en eje de salida | ≤120N/≤170N |
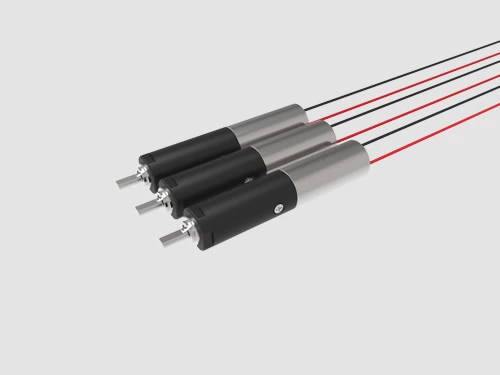
| Motores (Opcional) | paso a paso/CC con escobilla/Motor CC sin escobilla |
Customization

Nombre del Proyecto: Motor de Articulación del Robot
Antecedentes del Proyecto: En la interacción y comunicación de respuesta rápida, el motor de engranajes CC se utiliza para accionar las articulaciones del robot, que requieren una gran relación de potencia a masa y relación de par a inercia, un alto par de arranque, una baja inercia, y un amplio y suave rango de regulación de velocidad. En particular, la pinza robótica debe utilizar un motor de robot con un pequeño volumen y masa, y una gran capacidad de sobrecarga en un corto tiempo.
Logro: El robot se combina con el servomotor planetario para robot de ZHAOWEI, que puede mejorar en gran medida la calidad y la eficiencia del robot. El motor CC de engranajes para robot tiene cambios de transmisión de dos etapas, tres etapas y cuatro etapas. La relación de reducción, la velocidad de entrada y el par de la caja de cambios se pueden ajustar de acuerdo con los requisitos de diseño del motor de robot.