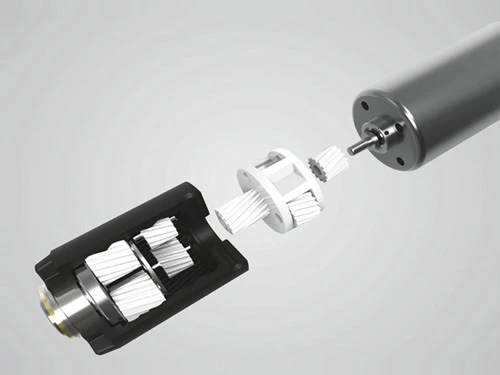
El motor de engranajes para robot es la combinación de la caja de cambios y un mini motor de robot utilizado para el robot inteligente. Es un sistema de transmisión de reducción que consiste en el motor de accionamiento (micromotor) y la caja de cambios (reductor). El mini motor robótico tiene la función de desacelerar y aumentar el par del motor robótico, lo que puede permitir que el robot se mueva y camine. Por ejemplo, se puede utilizar un motor DC con escobillas, un servomotor, un motor paso a paso como fuente de accionamiento, y también se puede instalar un codificador. Una caja de cambios planetaria, una caja de cambios de plástico o una caja de cambios metálica, una caja de cambios de tornillo sin fin, una caja de cambios de eje paralelo, una caja de cambios cilíndrica pueden usarse como un reductor. Los parámetros, como la potencia de salida, la velocidad de salida, la relación de reducción, el par de salida, la tensión nominal, los diámetros, la estructura de la caja de cambios, el ruido de la transmisión, la precisión de la transmisión, la temperatura de funcionamiento son desarrollados a medida. ZHAOWEI Machinery & Electronics Co., Ltd está comprometida a proporcionar sistemas de accionamiento de desarrollo y fabricación de motor de engranajes para robot inteligente con parámetros técnicos personalizados (diámetro: 3,4 mm-38 mm; Voltaje: por debajo de 24V; potencia de salida: por debajo de 50W; Velocidad de salida: 5rpm-2000rpm, relación de engranajes: 5-1500). Par de salida: 1,0 gf.cm -50kgf.cm. El contragolpe de la caja de cambios es dentro de 1-2 minutos de arco, y el ruido de la transmisión por engranajes es por debajo de 45 dB.

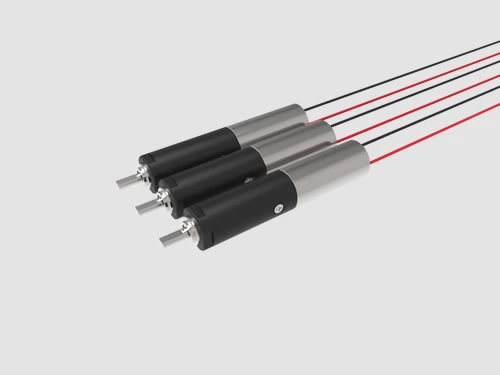
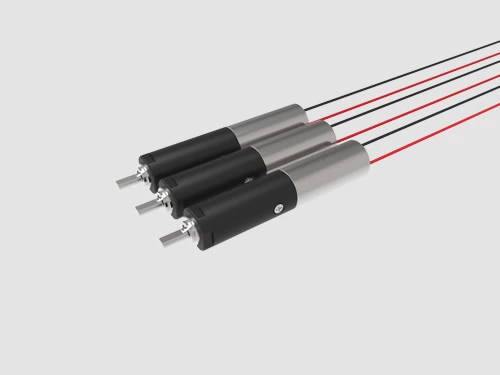
Parámetros del Motor de Engranajes para Robots:
| Material | Metal |
| Diámetro externo | 38mm |
| Rango de temperatura de funcionamiento | -30℃~+100℃ |
| Dirección de rotación | cw&ccw |
| Blacklash de engranaje | ≤2° |
| Voltaje (Opcional) | 3V~24V |
| Cojinete | Cojinete poroso/Rodamiento |
| Velocidad de entrada | ≤15000rpm |
| Holgura axial | ≤0.1mm/≤0.1mm |
| Corriente | 300mA max |
| Carga radial en eje de salida | ≤120N/≤180N |
| Motores (Opcional) | paso a paso/CC con escobilla/Motor CC sin escobilla |
Personalización
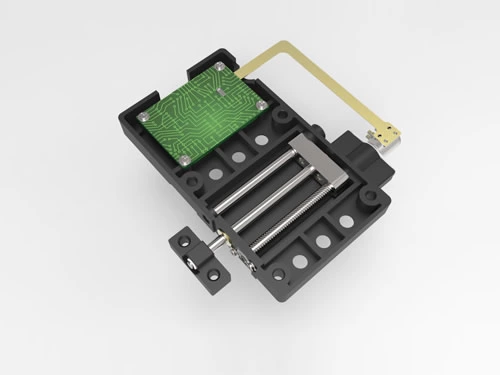
Nombre del Proyecto: Motor de Rueda de Robot
Antecedentes del Proyecto: Los robots se dividen en tipo de rueda, tipo de piernas, tipo de cadena, tipo de serpiente, o tipo compuesto de acuerdo con sus modo de movimiento. Entre ellos, los robots con ruedas ocupan una posición relativamente importante en el campo de los robots móviles autónomos. Tienen las características de movimiento rápido y control sencillo, y se utilizan ampliamente en líneas de producción de paletizado automático, vehículos no tripulados y otros campos.
Logros Técnicos: La parte motriz del robot con ruedas adopta una combinación de un motor CC y una caja de cambios planetaria de 38 mm con el método de instalación antisimétrica. (El motor paso a paso para las ruedas del robot también es de un tipo común). Este método puede reducir la fuerza del eje de salida del reductor, acortar en gran medida la distancia entre las ruedas y ahorrar espacio bajo la condición de que el conjunto de ruedas sea coaxial y se necesite una gran potencia (generalmente el tamaño y la potencia del motor están en una cierta proporción). De esta manera, el motor de la rueda del robot puede ser de tamaño pequeño.