Los robots inteligentes tienen varios tipos de receptores internos y externos, dándoles la visión, la audición, el tacto y el olfato. Además, también tienen efectores que les permitan reaccionar con el medio ambiente circundante. El efector es generalmente reconocido como un “músculo” o el motor de auto-escalonamiento, lo que provoca el movimiento de las manos, los pies, la nariz y los tentáculos. En otras palabras, un robot inteligente debe tener al menos tres elementos: elementos sensorial, reactivo y de pensamiento.
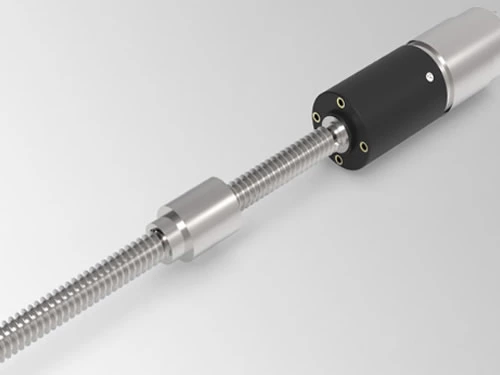
El micro servomotor de robot es un micromotor de engranajes de baja potencia, que puede ser utilizado en sistemas inteligentes de transmisión de robot. La estructura principal de transmisión se compone de un motor de accionamiento y una reductora (reductor). Un motor CC con escobillas, un motor BLDC, un motor sin núcleo, un motor paso a paso, o un servomotor se puede utilizar como una fuente de accionamiento del motor de accionamiento. Una reductora planetaria, una reductora cilíndrica, una reductora general o una reductora de gusano se puede utilizar como un reductor. Diferentes motores de engranajes se pueden utilizar en diferentes tipos de micro robots. La personalización de parámetros incluye la potencia de salida, el voltaje, la relación de reducción, el par de salida, la velocidad de salida, el ruido, y la precisión de la transmisión.
ZHAOWEI Machinery & Electronics Co., Ltd proporciona servicios de desarrollo personalizables. Los parámetros técnicos personalizados de motor de articulación de robot proporcionados por ZHAOWEI son los siguientes:
Diámetro: 3,4mm-38mm
Voltaje: ﹤24V
Potencia de salida: ﹤50W
Velocidad de salida: 5-1500rpm
Relación de engranajes: 2-2000
Par de salida: 1,0 gf.cm -50kgf.cm
Parámetros de Motor de Engranajes para Micro Robots:
| Material | Metal |
| Diámetro externo | 28mm |
| Rango de temperatura de funcionamiento | -20℃~+85℃ |
| Dirección de rotación | cw&ccw |
| Blacklash de engranaje | ≤3° |
| Voltaje (Opcional) | 3V~24V |
| Cojinete | Cojinete poroso/Rodamiento |
| Velocidad de entrada | ≤15000rpm |
| Holgura axial | ≤0.1mm/≤0.1mm |
| Corriente | 300mA max |
| Carga radial en eje de salida | ≤120N/≤170N |
| Motores (Opcional) | paso a paso/sin núcleo/Motor CC sin escobilla |
Personalización
Nombre del Proyecto: Motores de Engranajes para Robots con Ruedas
Dificultades Técnicas: Los robots inteligentes son capaces de actuar según las fórmulas para pre-programadas, o directrices formuladas por la tecnología de AI. Los robots inteligentes maduros pueden reemplazar el trabajo manual, incluyendo la producción, la construcción o los trabajos de alto riesgo. Los robots pueden ser diferenciados en tipos de rueda, tipos de las piernas, tipos de cadenas, tipos de serpientes, o tipos compuestos de acuerdo con sus movimientos. Los robots móviles con ruedas representan una porción relativamente grande de robots móviles autónomos. Tienen movimientos rápidos, control sencillo, y son ampliamente utilizados en las líneas de producción automáticas de paletización y vehículos no tripulados.
Dificultades Técnicas: 1. Los robots móviles con ruedas tienen una mala capacidad de giro 2. Los robots móviles con ruedas tienen una capacidad de escalada pobre, lo que limita el uso de este robot motorizado de CC.
Logro: La parte de accionamiento del robot móvil con ruedas utiliza un motor CC y una reductora planetaria de 38 mm, que se instalan de forma anti-simétrica. Este método puede hacer que el conjunto de rueda sea coaxial, y da una mayor potencia (el tamaño y la potencia de motor son generalmente proporcional a una determinada relación). Esto reduce el punto de presión sobre el eje de salida del reductor, acorta la distancia entre ejes de rueda manera significativa, y ahorra espacio, haciendo un compacto robot.