








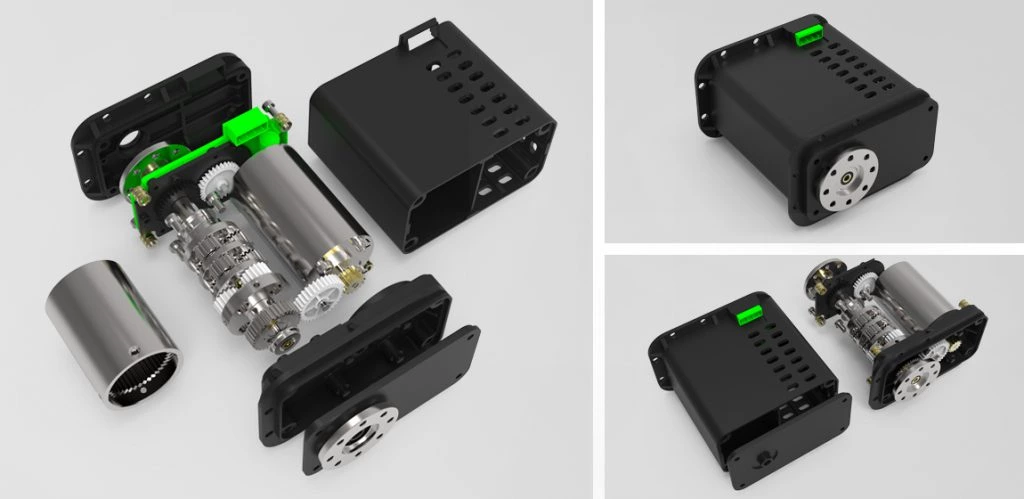
Servomotor Sin Escobillas para Articulaciones de Robot
- Voltaje
- 24V
- Corriente
- 1.22 A
- Velocidad nominal
- 34rpm
- Par nominal
- 4.2N.m
- Rango de temperatura de funcionamiento
- 0℃~60℃
- Ángulo de rotación
- 0°~360°
 Hoja de datos pdf
Hoja de datos pdf







Antecedentes del Proyecto
Los fabricantes siempre apuntan a adoptar engranajes de robot de alto rendimiento sobre la base del motor de robot para obtener mayores ventajas en términos de facilidad de uso, posicionamiento de alta precisión y bajo ruido durante la operación. La evolución de los servomecanismos de ZHAOWEI da lugar a nuevas capacidades en la robótica.
Características
1. Flexibilidad de movimiento - 6 DOF
Cada articulación del robot es un servomotor sin escobillas que proporciona el desplazamiento de los segmentos una vez que reciba un impulso. El número de enlaces en la estructura del mecanismo define cuántos grados de libertad (DOF) tiene. Con un codificador de sensor de ángulo integrado en las articulaciones, el servomotor sin escobillas permite un desplazamiento angular preciso dentro del lapso de 360°. Así, los robots pueden alcanzar el control de seis grados de libertad (6 DOF) para las acciones. El grado mínimo ajustable es incluso de hasta 0,17°. Esto puede mejorar el control de las articulaciones del robot para una rotación y un movimiento flexibles.
2. Alta densidad de par
Las reductoras planetarias incorporadas permiten aumentar el par de salida del servomotor sin escobillas que adopta la articulación robótica hasta un nivel superior sin que ello afecte a las dimensiones generales del servo. Aquí los engranajes robóticos proporcionan una mayor relación potencia a peso, relación par a inercia, mayor par de arranque y baja inercia.
3. Control de movimiento de alta precisión
Una serie de potentes tecnologías de fabricación y ensamblaje implican una alta precisión para el contragolpe lo suficientemente pequeño, minimizando las pérdidas de eficiencia. Además, los dispositivos de detección buscan cambios en la posición, transfiriendo los datos recopilados a un controlador dentro de la carcasa del servo. El módulo de controlador actúa como un centro intelectual que procesando la retroalimentación para establecer lo que necesita ser ajustado para lograr la posición deseada.
4. Aplicación más amplia
La conmutación con electrónica en lugar de escobillas permite mayor responsabilidad y capacidad. Así, además de las aplicaciones de articulación robótica, este servomotor sin escobillas también puede utilizarse en equipos médicos, soluciones domésticas inteligentes, sistemas de accionamiento de elevación, etc.
* Dado que el diseño modular está disponible para el motor de articulación de brazo robótico con engranajes de robot, los clientes son bienvenidos a personalizar las soluciones para mejorar las propiedades de flexibilidad.


